(0)
Pludo Self Balancing Car – Balance & Motion Learning DIY Kit for Kids Ages 5–8 | Grade 1-3
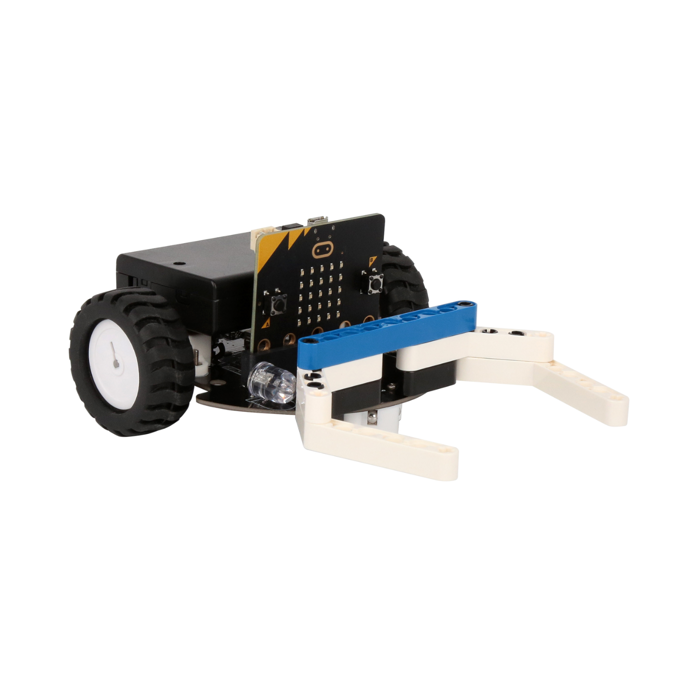
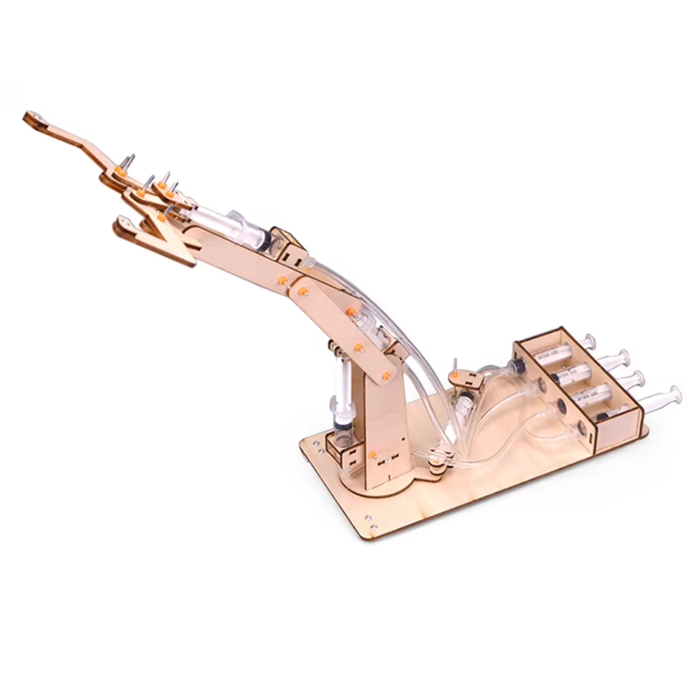
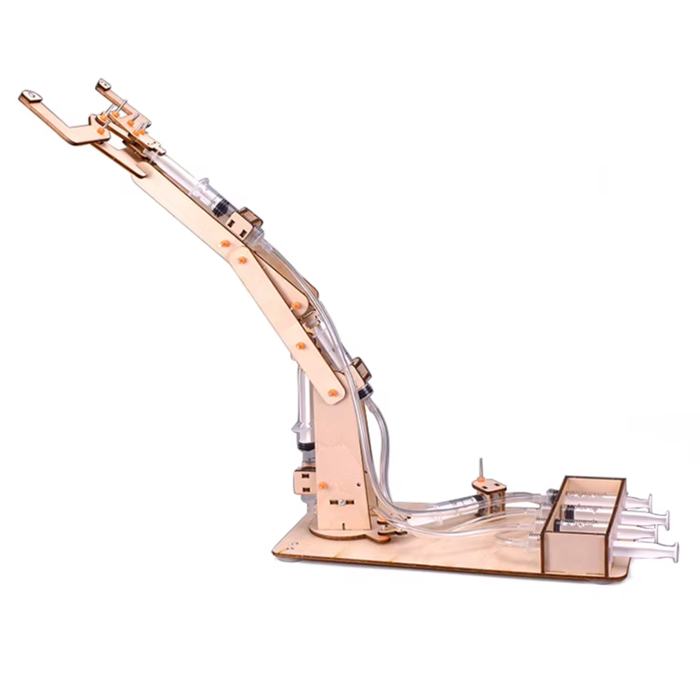
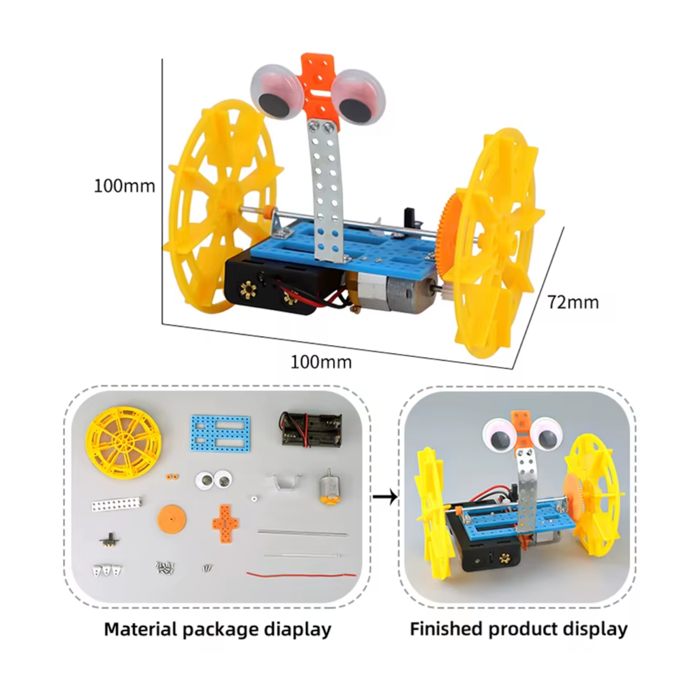
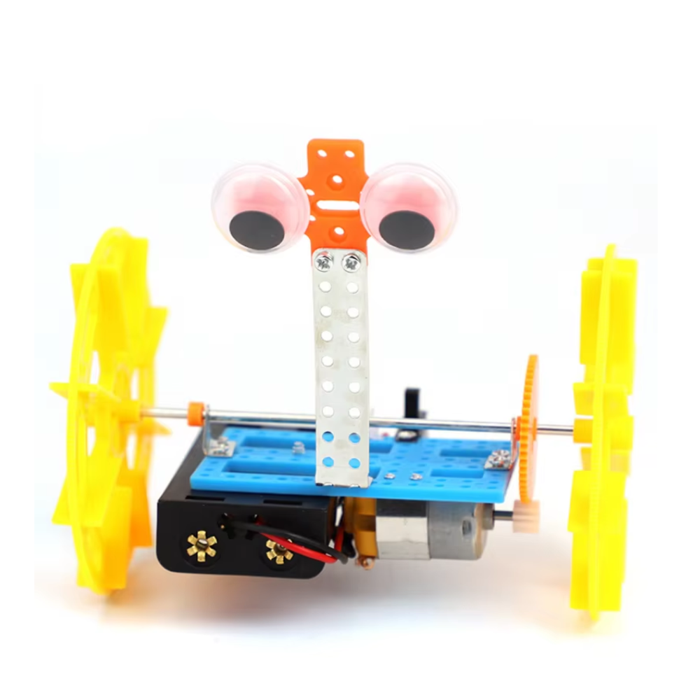
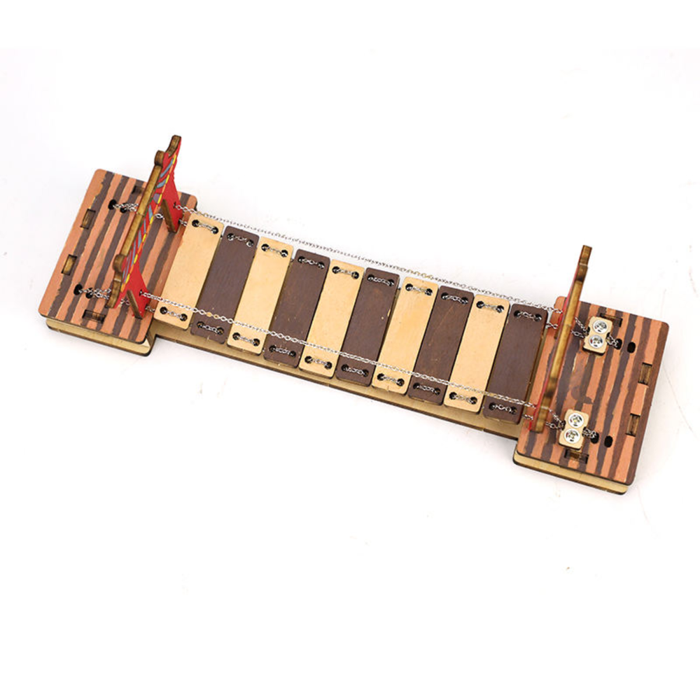
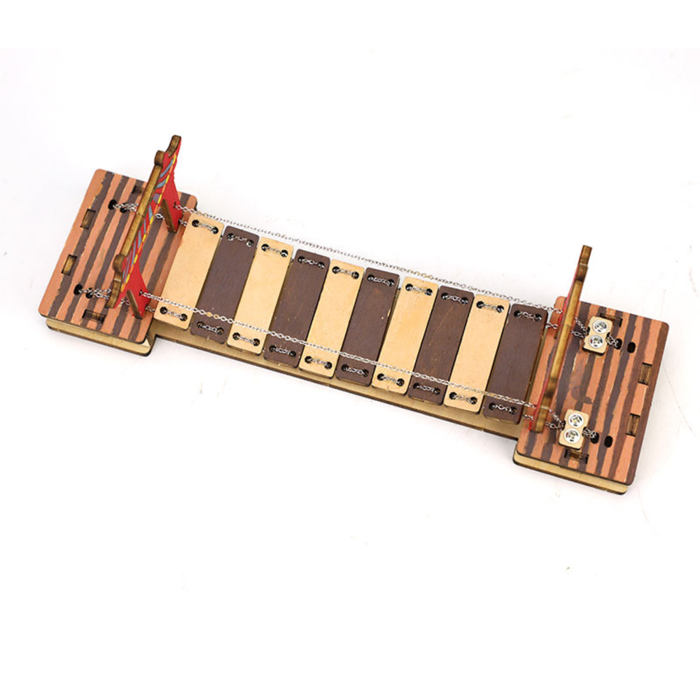
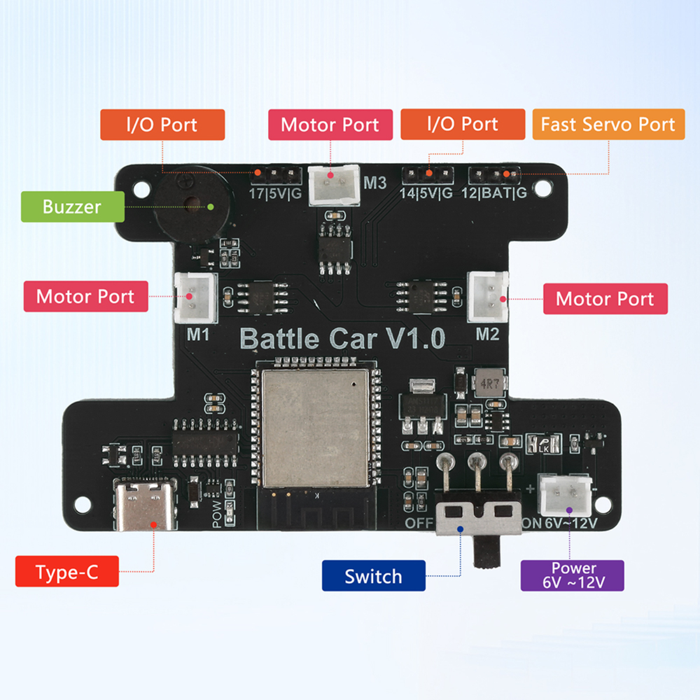
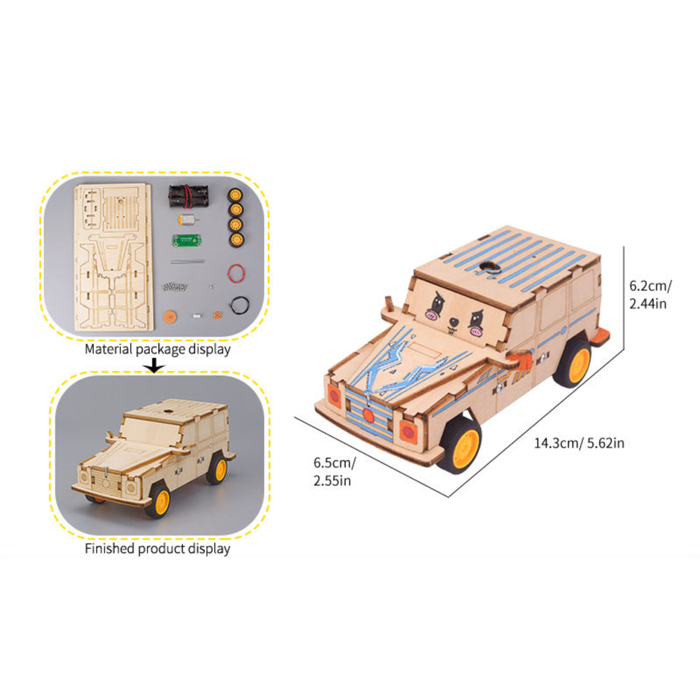
Kick-start hands-on learning with a self-balancing car children can build from scratch, turning simple parts into real engineering moments that feel like play. This Robotic Diy Kit project guides young makers to assemble a motor-powered car with a battery holder, gears, and wheels, making energy and motion easy to see in a safe, screen-free activity. With clear steps and child-friendly parts, it introduces basic circuits and mechanics while building fine motor skills, problem-solving, and early confidence.
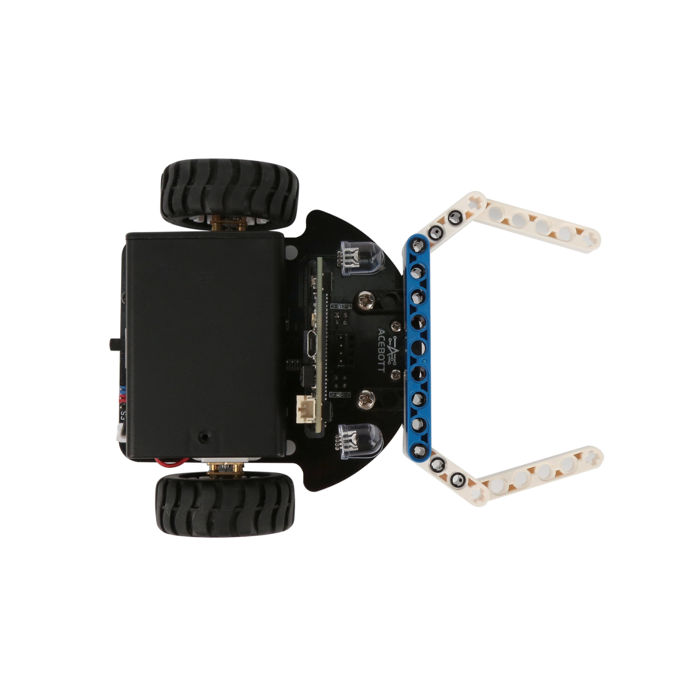
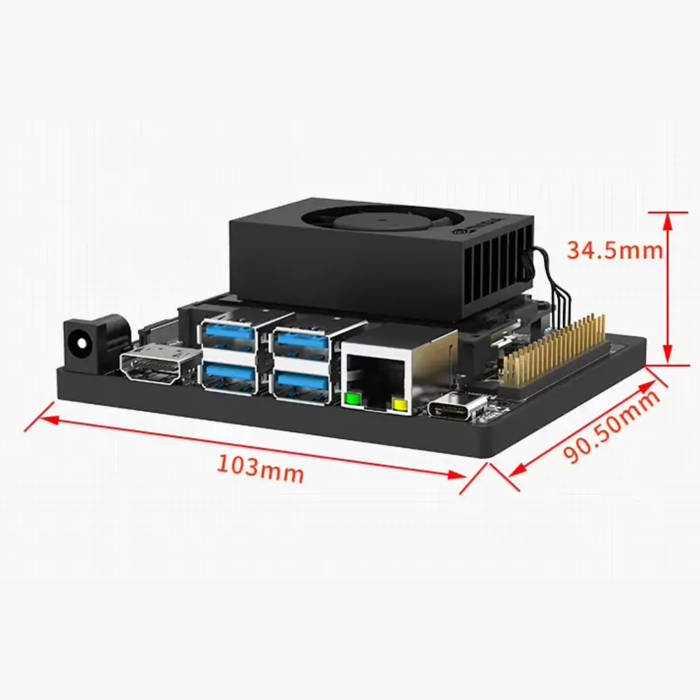
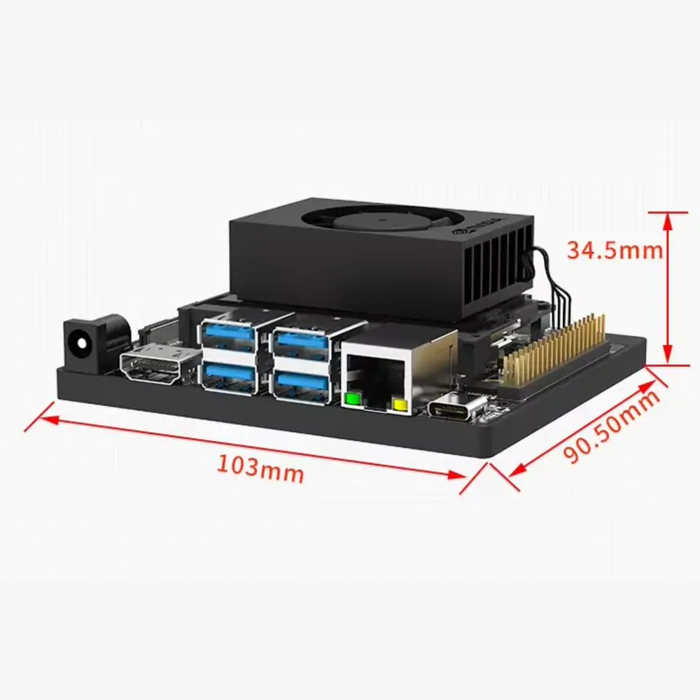
The motor drives gears that rotate both wheels, creating smooth forward motion.
Balanced force on each wheel keeps the robot stable, showing how motors and gears work together for controlled movement.
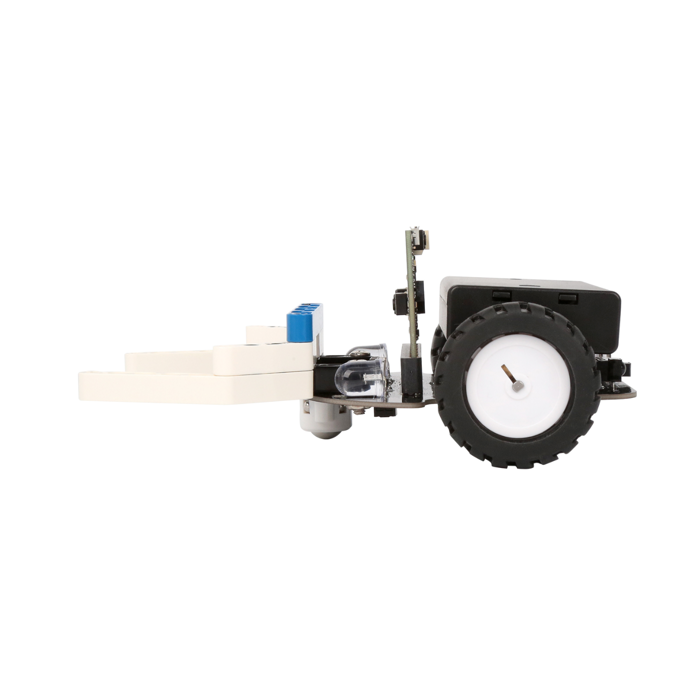
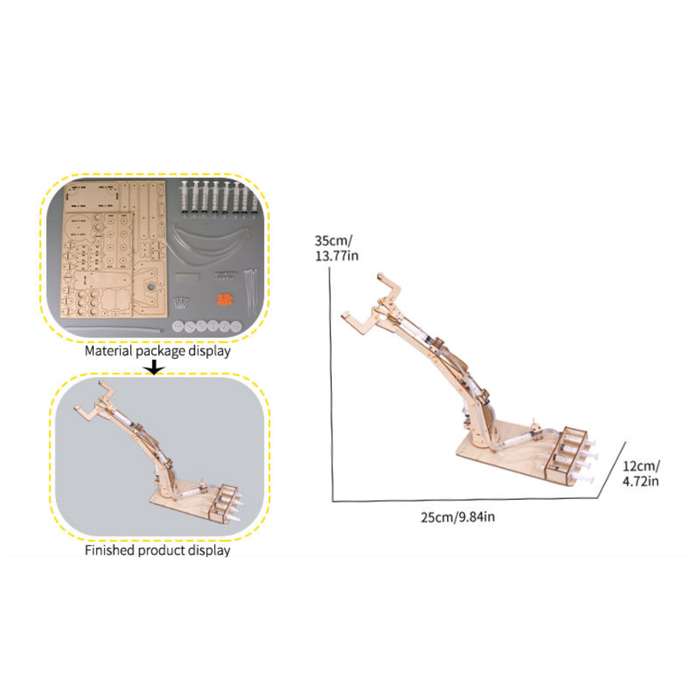
Perfect for classrooms, makerspaces, and home learning, the kit rolls smoothly to demonstrate balance and cause-and-effect, ideal for demos, STEM fairs, and early physics lessons. Thoughtfully sized for easy storage, it fits naturally into a starter diy kit setup, complements broader diy science kits, and adds variety to any diy car kit collection, encouraging repeat builds and deeper exploration over time.
What Your Child Will Learn
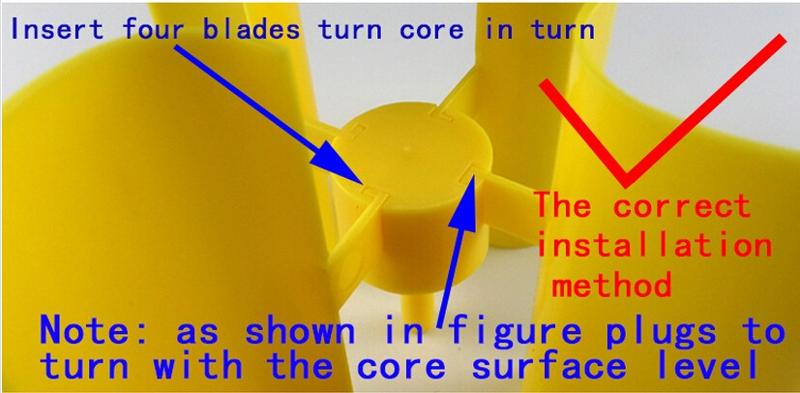
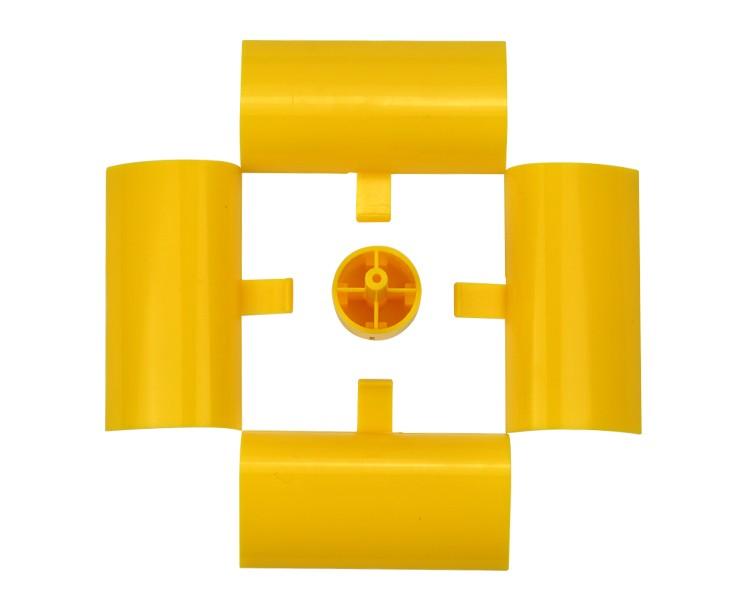
Build a motorized car and explore how power, gears, and balance work together to create movement.
Understand the flow of electricity and how it drives mechanical motion.
Strengthen fine motor skills and spatial awareness through guided assembly.
Learn the fundamentals of balance, speed, and direction in a fun, interactive way.
Boost focus, patience, and creative thinking by experimenting with different setups.
Ideal for STEM learning at home, classrooms, or science fairs, encouraging exploration beyond textbooks.
Educational Outcomes
Electricity & Circuits:
Discover how motors and batteries work together to produce motion.
Mechanics in Motion:
Understand gear movement, friction, and balance in a two-wheel design.
Engineering Mindset:
Practice logical sequencing, trial and error, and system-based thinking.
Fine Motor Development:
Enhance coordination and concentration while assembling small components.
Confidence Through Creation:
Experience the satisfaction of building something functional from scratch.
💡 Did you know?
Robots use the same principles of balance and motion control that your two-wheel car demonstrates - it’s the foundation of robotics!
Features:
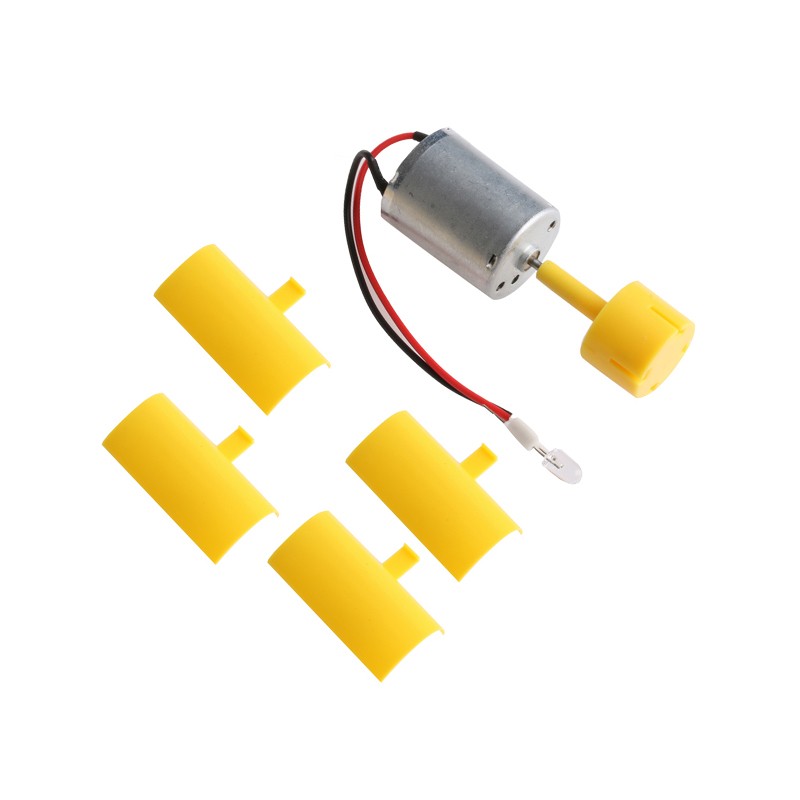
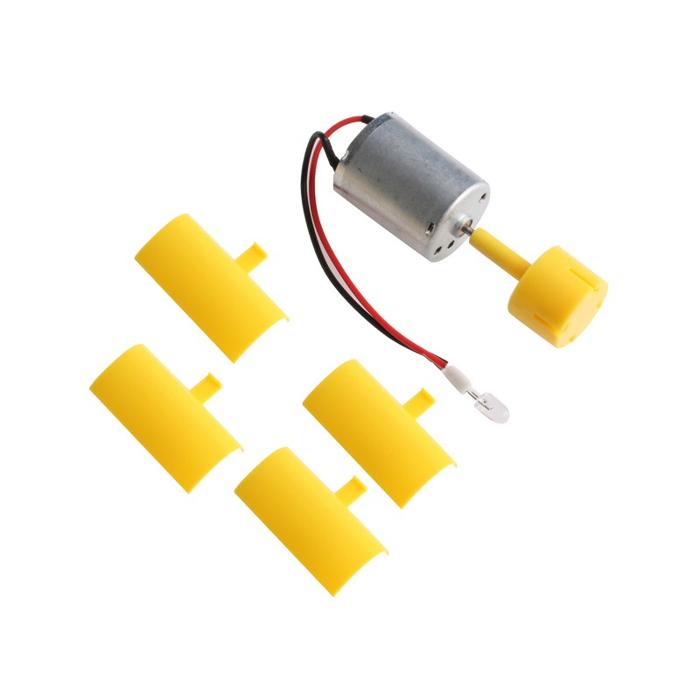
Assemble a simple two-wheel car with motor, gears, wheels, and a battery holder for screen-free learning.
Introduces basic electricity and mechanics using child-friendly parts and clear instructions.
Demonstrates balance in motion as kids observe how power reaches the wheels and drives movement.
Helps develop fine motor skills, problem-solving, focus, and confidence through guided tinkering.
Perfect for classroom lessons, STEM fairs, or at-home experiments with easy setup and cleanup.
Made with lightweight, durable components that allow repeated builds for continued learning.
₹540.77
Backorder Available
In Store Pickup
Same Day Shipping
₹1258.60
Incl. GST (No Hidden Charges)