(0)
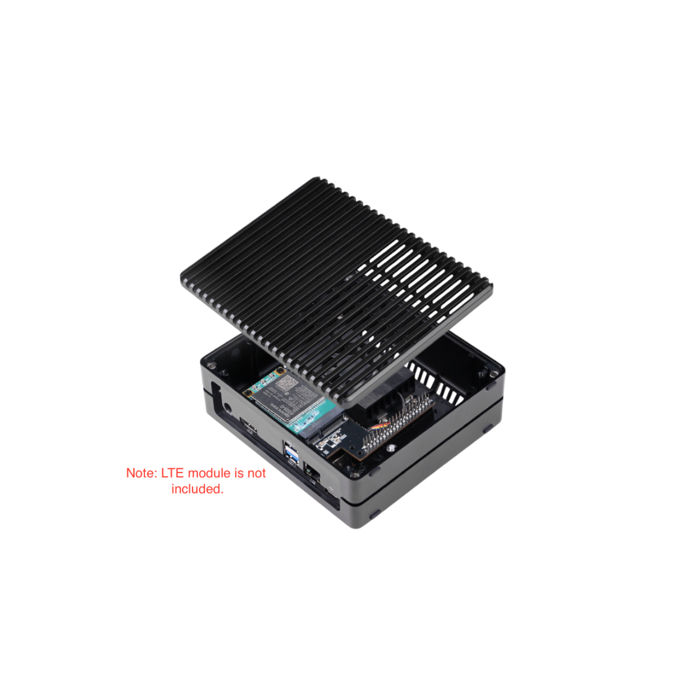
reComputer J4012B Edge AI Computer Powered by NVIDIA Jetson Orin NX 16GB 100 TOPS AI
The reComputer J4012B Edge AI Computer, built on the NVIDIA Jetson Orin NX 16GB module, is engineered for high-performance AI at the edge, delivering up to 100 TOPS of AI compute for robotics, automation, vision systems, and industrial AI deployments.
With a powerful 8-core Arm CPU, Ampere GPU with Tensor Cores, and 16GB LPDDR5 memory, this compact edge device is ideal for tasks such as real-time inference, multi-camera processing, deep learning, and edge analytics.
The pre-installed JetPack 5.1.3 ensures a ready-to-deploy development environment with optimized CUDA, cuDNN, and TensorRT support.
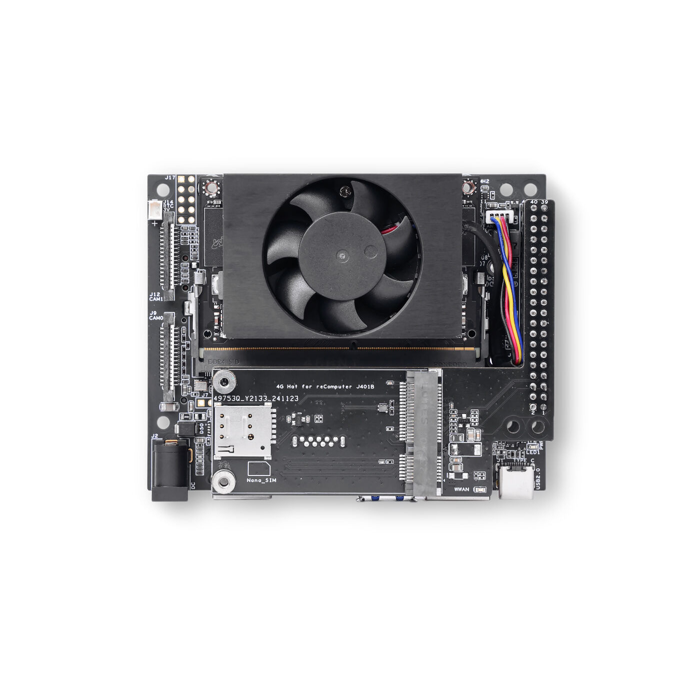
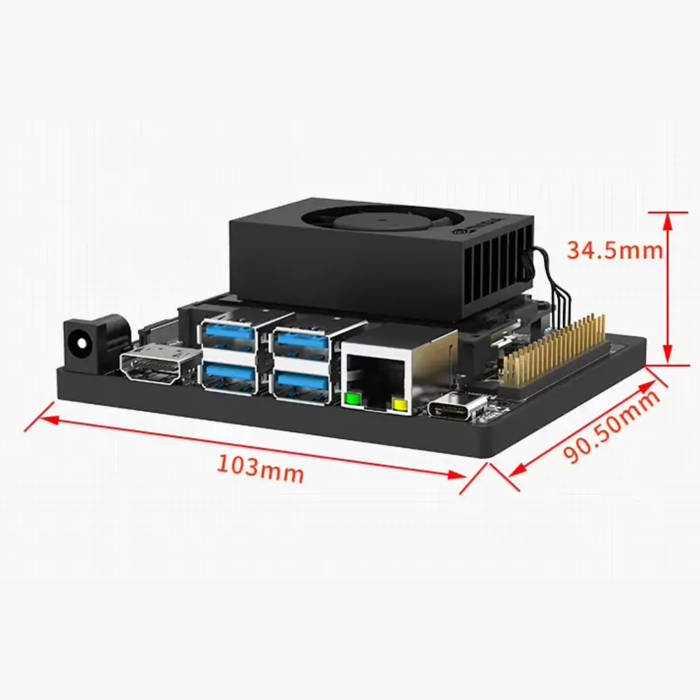
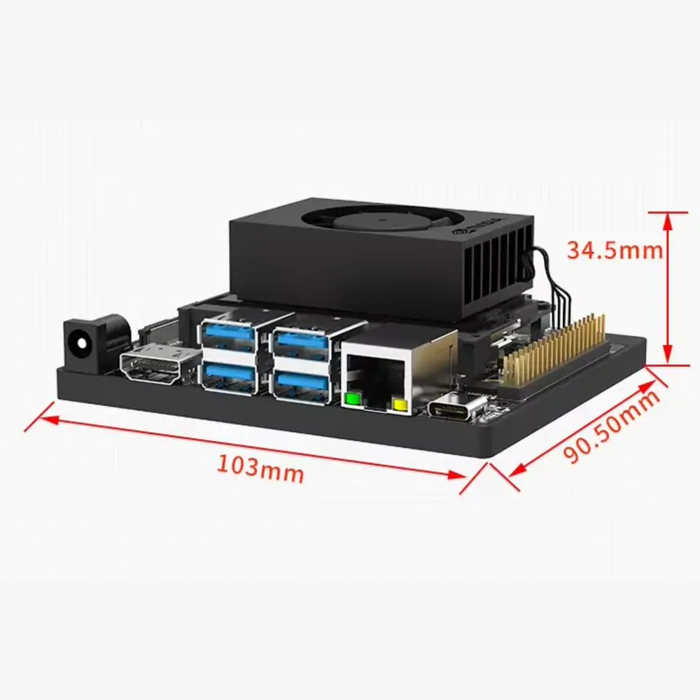
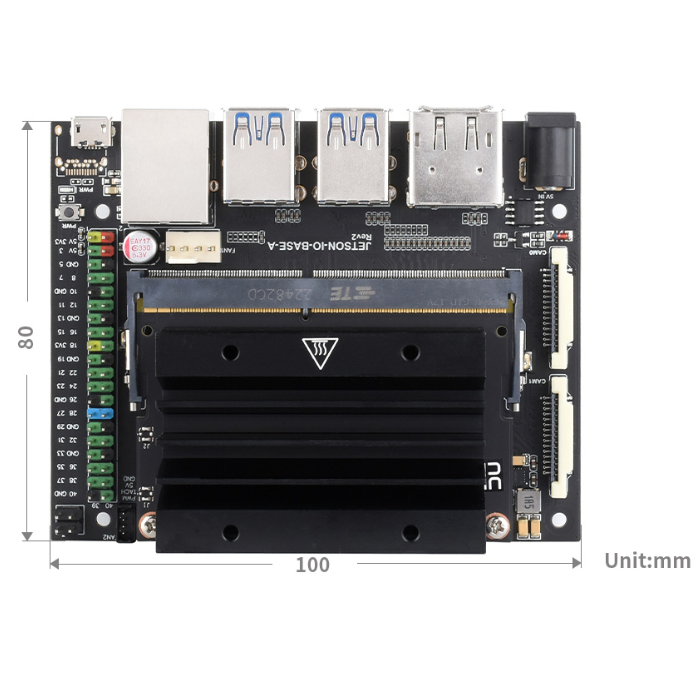
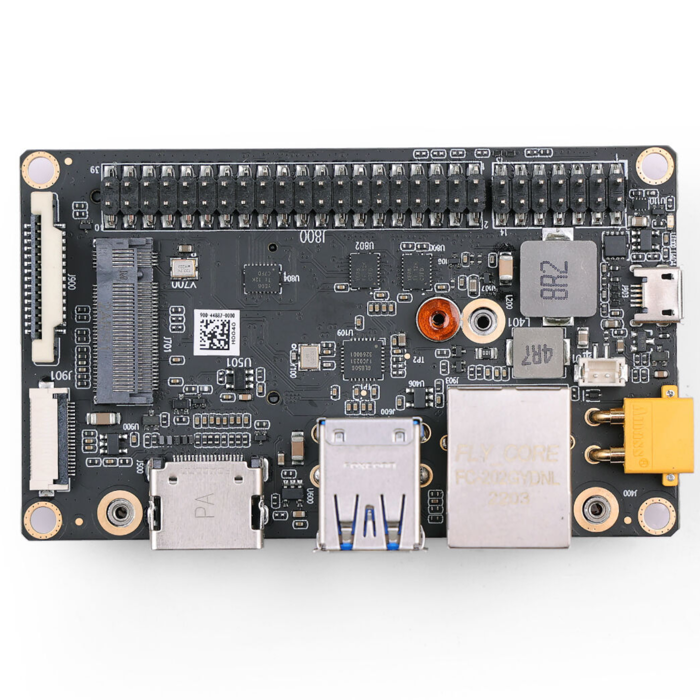
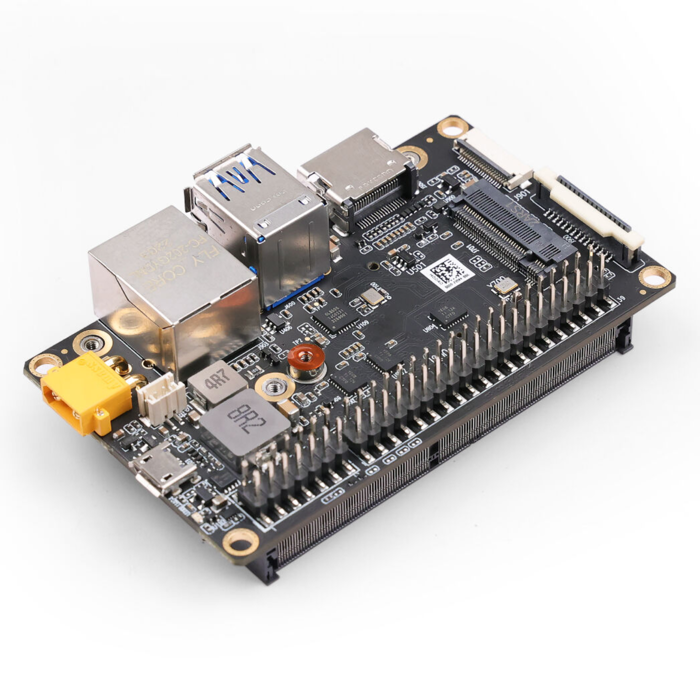
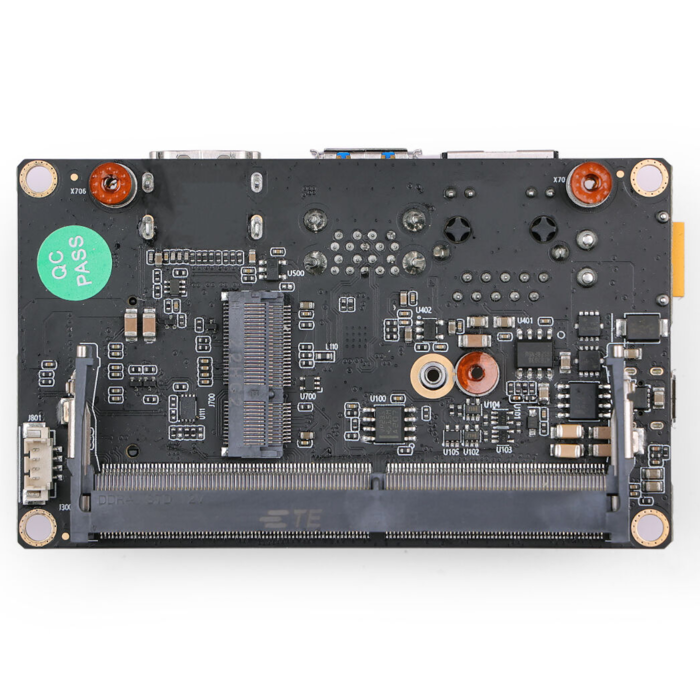
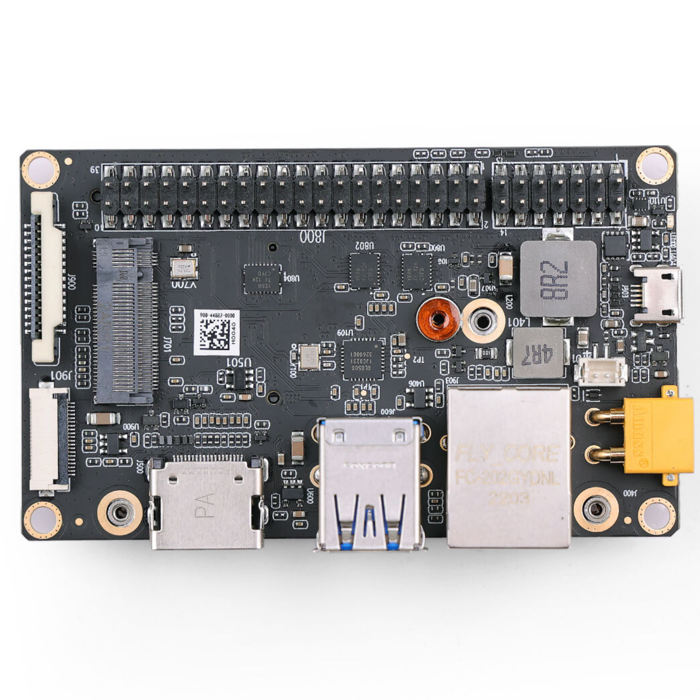
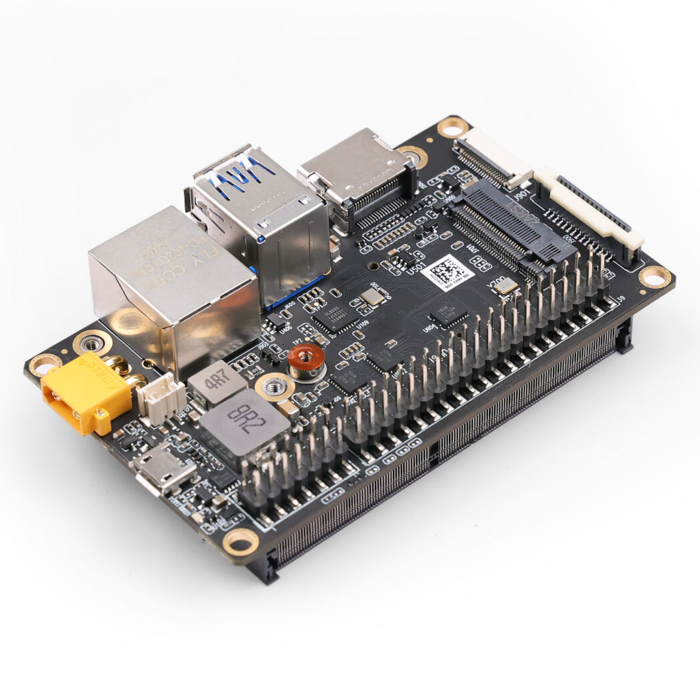
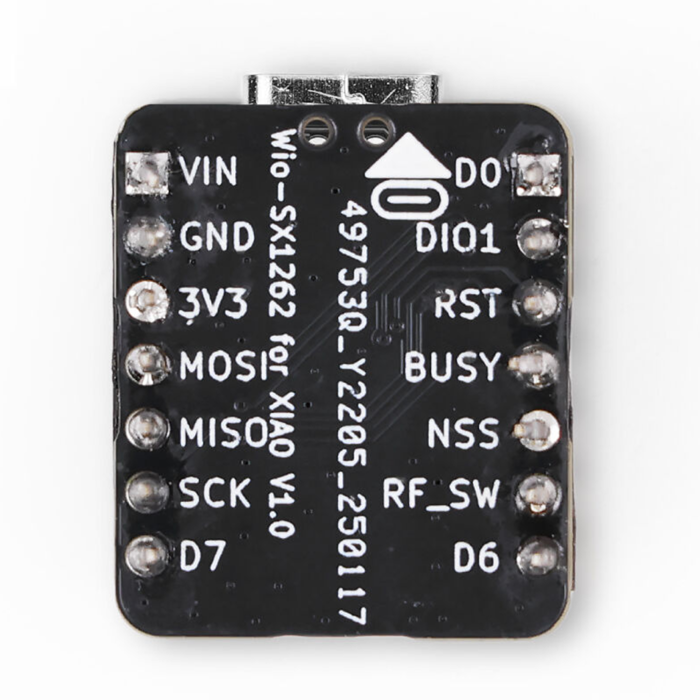
Designed for both prototyping and large-scale production, the reComputer J4012B includes a rich set of interfaces - USB 3.2, HDMI, Gigabit Ethernet, M.2 Key M for SSD, M.2 Key E for Wi-Fi, mini-PCIe for LTE, CAN bus, and 40-pin expansion header.
With a durable aluminum case, active cooling, 128GB NVMe SSD, and certifications including CE, FCC, KC, ROHS, REACH, this device is ready for industrial, commercial, and AIoT applications.
Guaranteed long-term availability until 2032, the J4012B is a future-proof platform for next-generation edge computing.
Features:
Powered by NVIDIA Jetson Orin NX 16GB, delivering up to 100 TOPS for advanced AI workloads.
Features a 1024-core NVIDIA Ampere GPU with 16 Tensor Cores for accelerated deep learning and computer vision tasks.
Built with a high-efficiency 8-core Arm Cortex-A78AE CPU for reliable real-time edge processing.
Comes pre-installed with a 128GB NVMe SSD for fast storage and ready-to-deploy performance.
Offers rich connectivity: 2× USB 3.2, HDMI, Gigabit Ethernet, M.2 Key M, M.2 Key E, mini-PCIe, CAN, 40-pin GPIO and more.
Includes JetPack 5.1.3 preloaded for immediate development in Linux, CUDA, and AI frameworks.
Robust aluminum enclosure with active cooling for stable 24/7 operation.
Certified with CE, FCC, KC, UKCA, ROHS, REACH for industrial and commercial use.
Long-term supply availability until 2032, ideal for scalable deployments.
Applications:
Smart Lamppost Systems
Smart lampposts use integrated sensors to monitor traffic flow, pedestrian movement, and environmental conditions. The collected data helps city authorities optimize traffic control and improve public safety. Many smart lampposts also operate on solar energy, storing power for nighttime illumination and even feeding surplus electricity back into the grid to support sustainable urban infrastructure
EV Battery Swapping & Charging Infrastructure
Modern EV charging and battery-swapping stations connect directly to smart grid networks, enabling efficient load balancing and optimized charging schedules. This reduces strain on the grid during peak hours and ensures faster turnaround times for EV users. Advanced systems even allow certain electric vehicles to return power to the grid, contributing to a more resilient and flexible energy ecosystem.
Smart Recycling & Waste Management Centers
Smart recycling hubs utilize sensors embedded in collection bins to track fill levels, minimizing unnecessary collection trips and reducing operational costs. Energy-efficient sorting machines operate during off-peak hours, lowering power consumption. Recycled materials collected through these systems are often further utilized in manufacturing components for EVs, renewable energy setups, and other smart grid technologies, promoting a circular and sustainable industrial cycle.
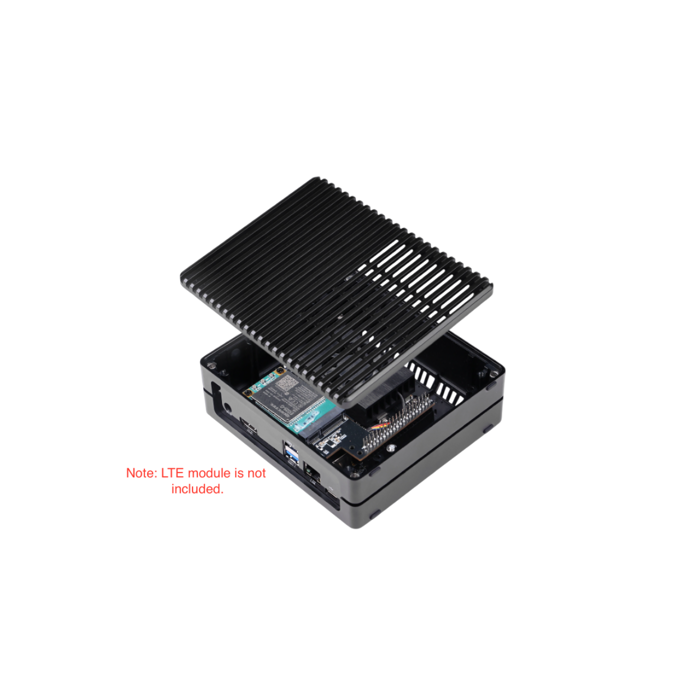
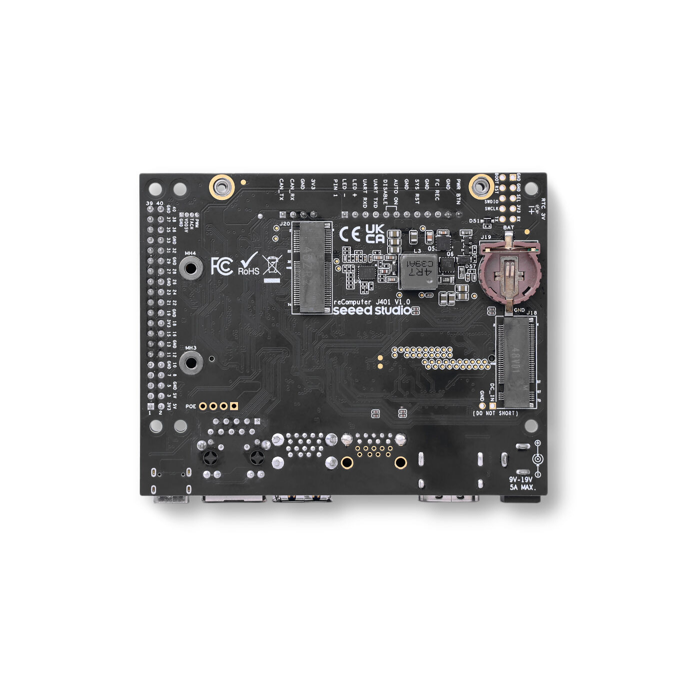
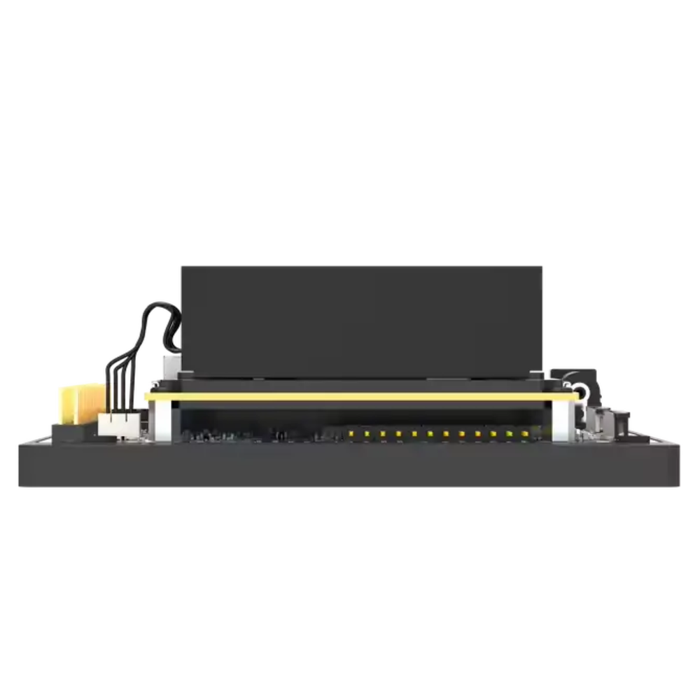
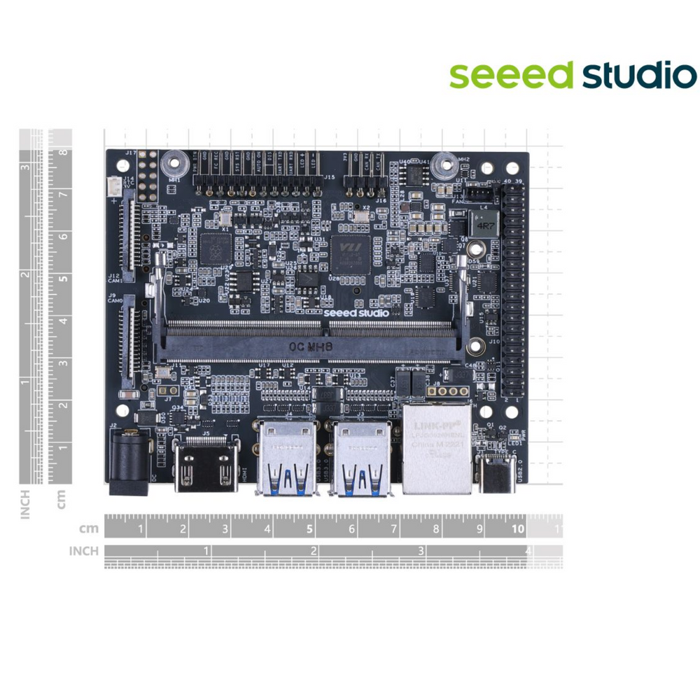
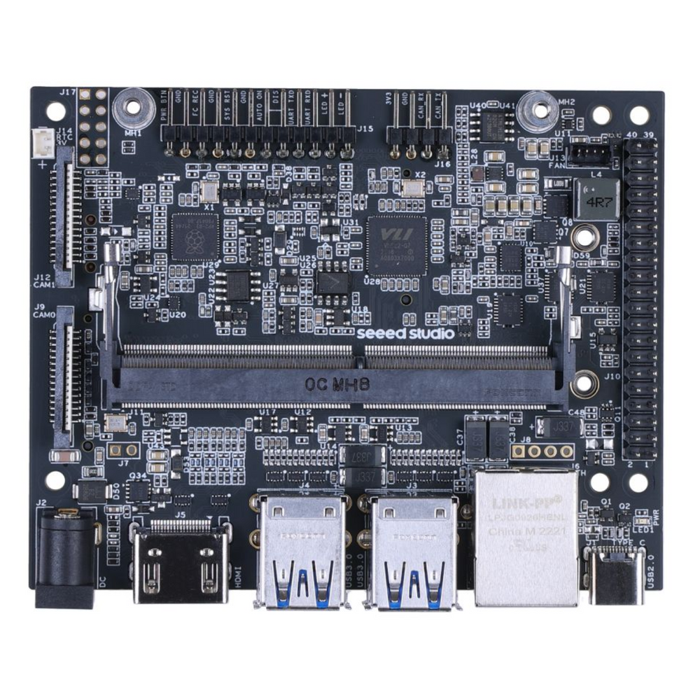
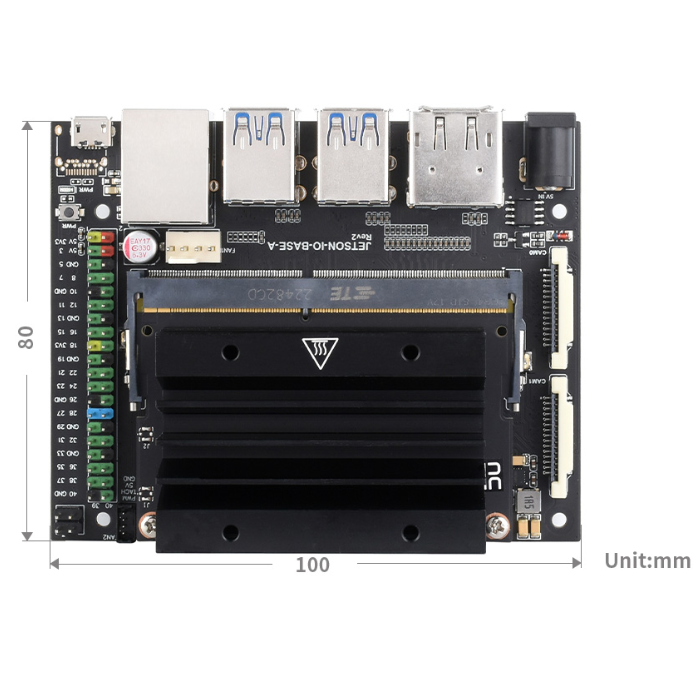
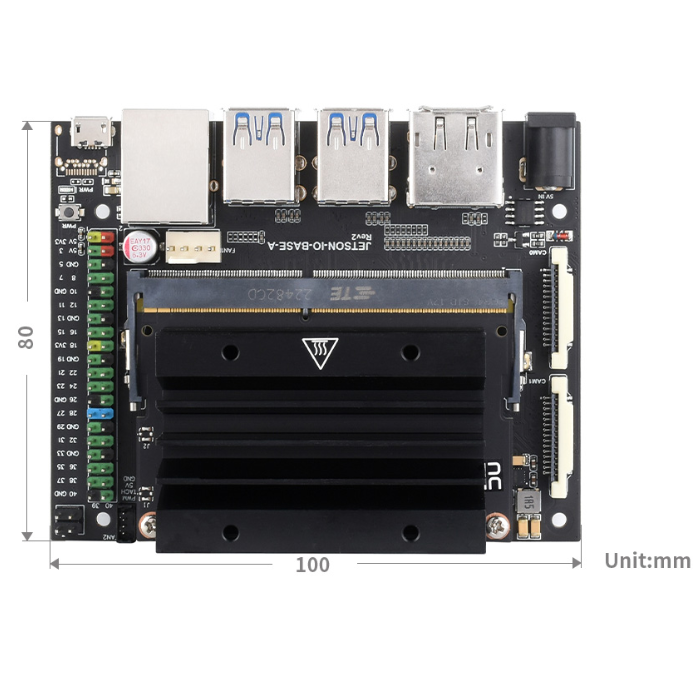
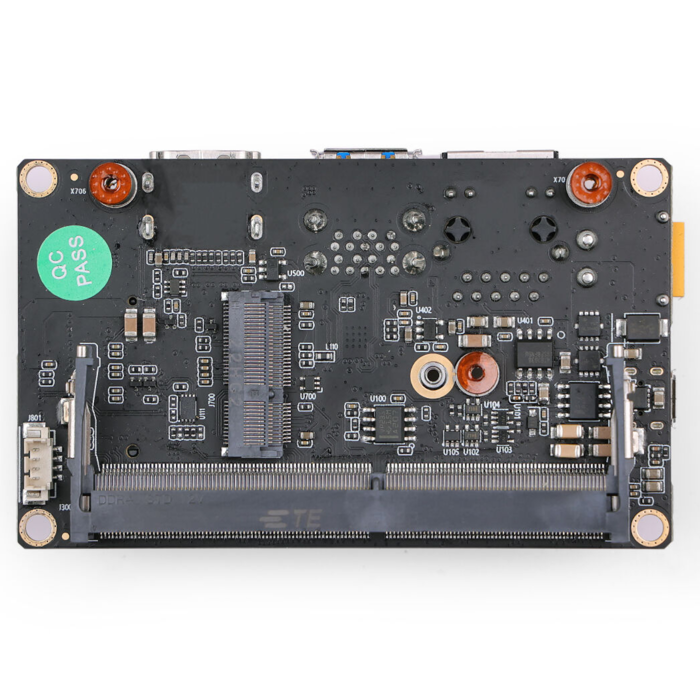
Hardware Overview:
₹119207.23
Backorder Available
In Store Pickup
Same Day Shipping
₹196000.00
Incl. GST (No Hidden Charges)