
MicroROS Self-balancing Car Robot Support 4KG Load Vision Kit
Delivery & Pickup Options
This item is not available right now. Please check back later or contact us for availability.
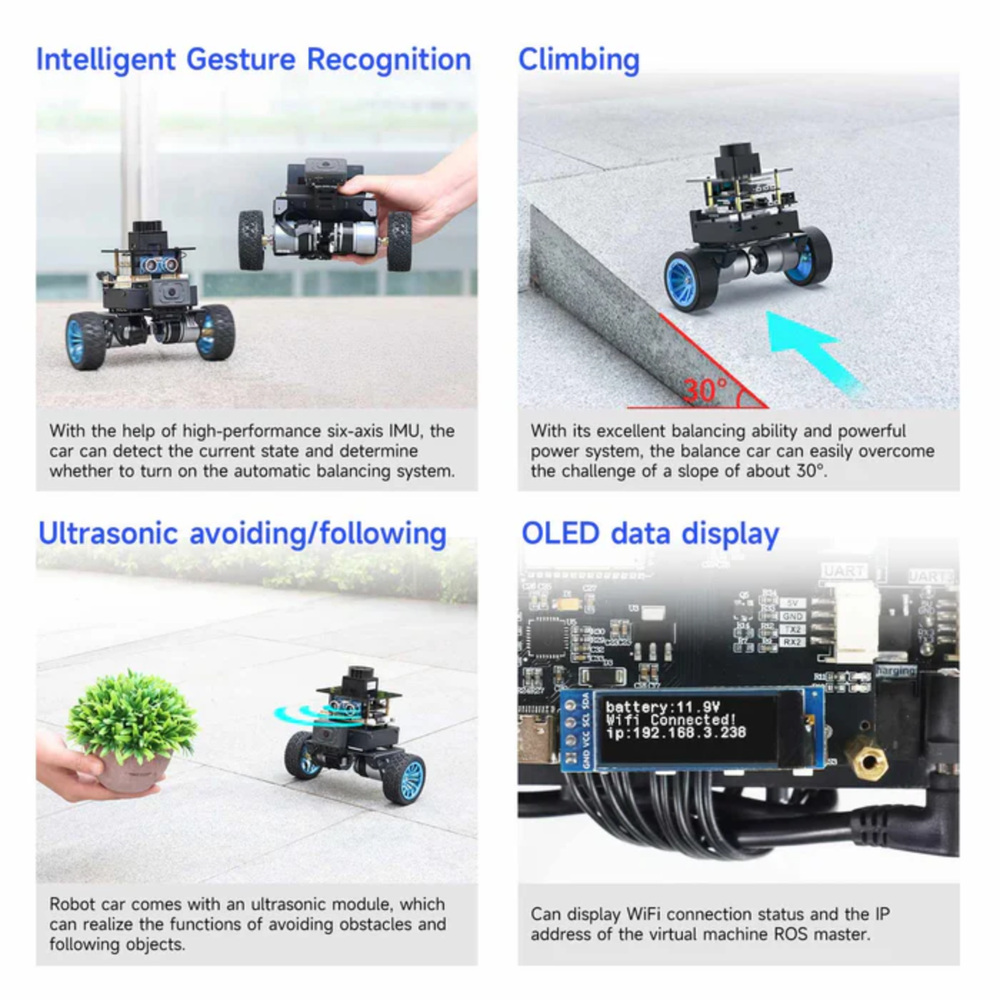
MicroROS Self-balancing Car Robot Support 4KG Load Vision Kit The MicroROS Self-balancing Car Robot Support 4KG Load Vision Kit is an advanced Self-balancing Car designed for learning, research, and real-world robotics applications. Built on a powerful STM32 + ESP32 dual-processor architecture, it features a sturdy metal chassis, high-power DC motors, and a 6-axis IMU sensor to deliver stable and precise balancing performance. With support for up to 4 kg load, this Self-balancing two wheel Car can easily handle slopes, obstacles, and dynamic movements while maintaining excellent control and responsiveness. Integrated with MicroROS and ROS2, the robot supports advanced functions such as SLAM mapping, navigation, and AI vision interaction. The Vision Kit includes TOF laser lidar and a ROS-WiFi camera module, enabling real-time obstacle avoidance, autonomous navigation, and visual recognition. An onboard OLED displays live data, while free mobile apps allow remote control and mapping. Ideal for students, educators, and robotics enthusiasts, this Self-balancing Car bridges hands-on hardware learning with powerful ROS-based software development in a single, expandable platform Basic Function The 6-axis IMU enables posture recognition, automatically starting the balance system when placed on the ground and safely shutting it down when lifted vertically. The self-balancing car supports up to 4 kg load, thanks to its sturdy multi-layer structure and high-torque encoder motor, allowing DIY expansion and accessories. With a powerful balance control system, the robot can smoothly climb slopes of up to 30° while maintaining stability. Ultrasonic sensors enable intelligent obstacle avoidance and target following, with easy switching between both modes during operation. The onboard OLED display shows real-time data such as operating mode and battery voltage for quick status monitoring. Equipped with ESP32 + STM32 Dual Processors The ESP32 communication board uses the ESP32-S3-WROOM-1U-N4R2 chip to support MicroROS wireless communication. It enables real-time transmission of data from multiple sensors—such as motors, gyroscopes, and LiDAR—to the virtual machine ROS master, ensuring fast and stable communication between the robot chassis and the ROS system. The STM32 control board , powered by the STM32F103RCT6 chip, is responsible for precise motor driving, gyroscope data processing, and motor encoder feedback. This ensures stable self-balancing performance and accurate motion control. The board also provides onboard expansion interfaces, supporting a wide range of peripheral connections for future upgrades. Hardware Features High-performance TOF Laser LiDAR (T-mini Plus) for fast, accurate indoor and outdoor mapping with up to 12 m range and strong light resistance ROS-WiFi camera module (AI Vision) enables real-time image streaming and AI processing with OpenCV and MediaPipe support High-precision encoder DC motors with AB phase Hall encoders deliver stable balancing, accurate speed feedback, and smooth motion control Durable metal self-balancing chassis with 2 mm thick construction ensures strength, stability, and reliable performance under load Features: Self-balancing two-wheel robot with support for up to 4 kg load STM32 + ESP32 dual-processor architecture for stable control and wireless communication Integrated MicroROS and ROS2 support for SLAM, navigation, and AI applications TOF laser LiDAR and ROS-WiFi camera for obstacle avoidance and visual recognition 6-axis IMU enables accurate posture recognition and balance control Capable of climbing slopes up to 30° with powerful DC motors Ultrasonic obstacle avoidance and target following modes Onboard OLED display for real-time status and voltage monitoring Free mobile apps for remote control and mapping Modular design with expansion interfaces for DIY learning and upgrades
- Self-balancing two-wheel robot with up to 4 kg load capacity for stable performance
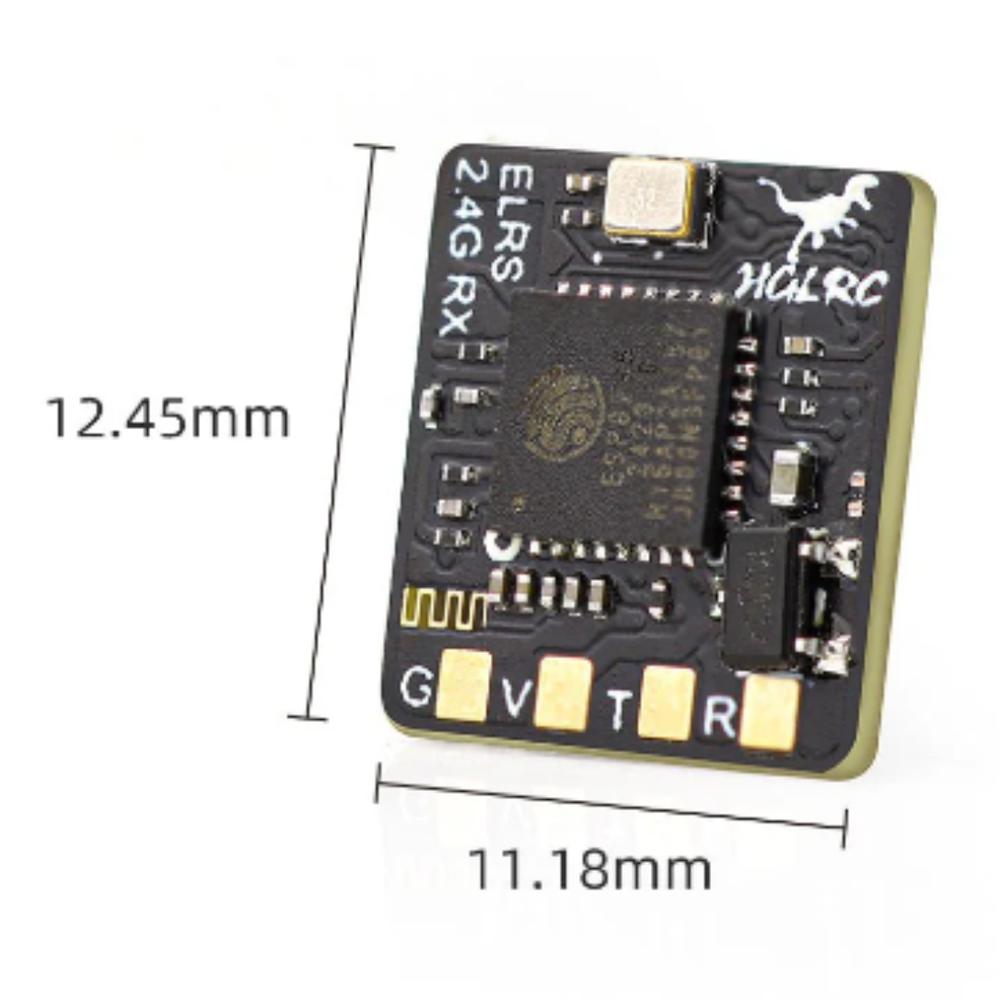
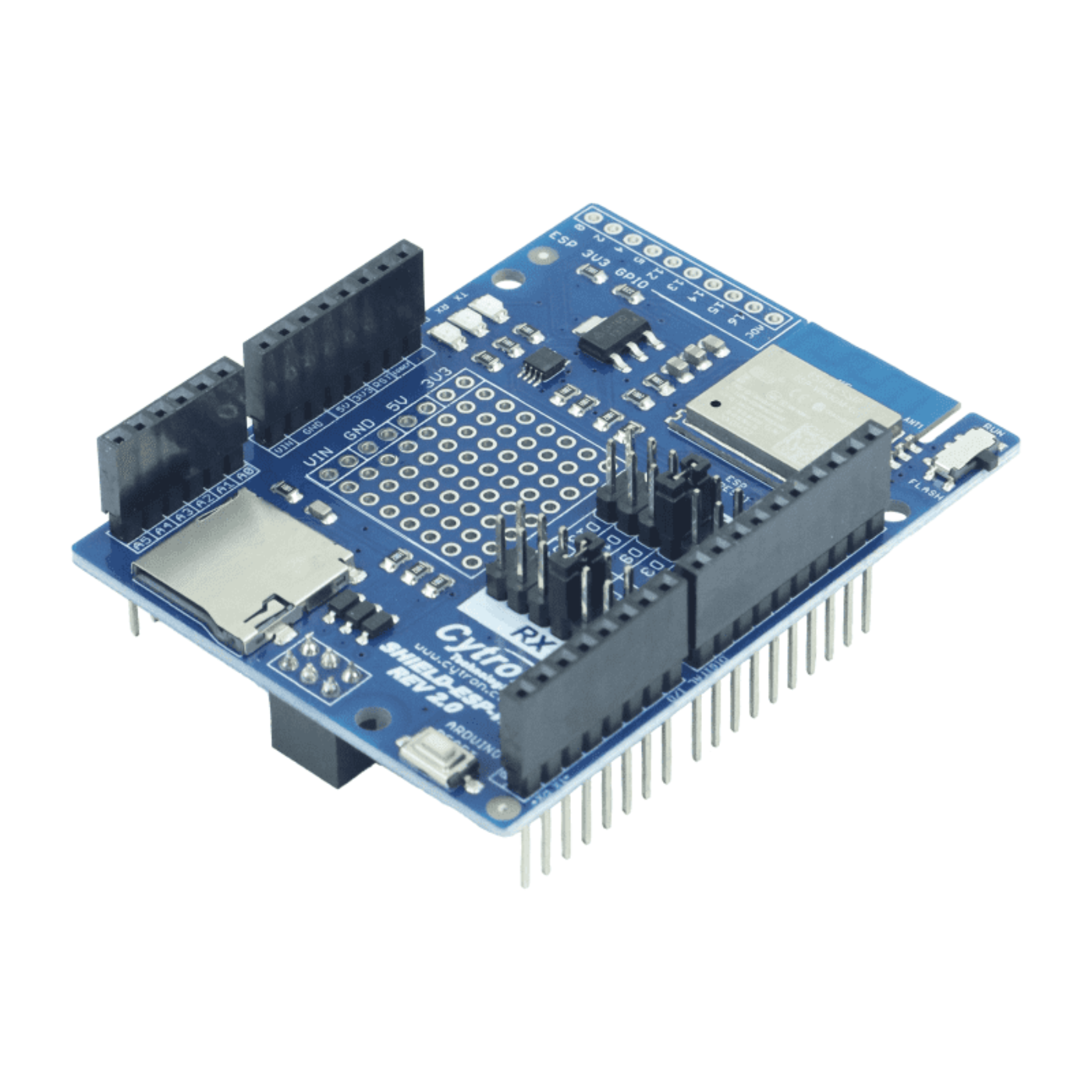
- STM32 + ESP32 dual processors ensure precise control and fast wireless communication
- Integrated MicroROS & ROS2 support for SLAM, navigation, and advanced robotics learning
- TOF LiDAR + AI vision camera enable real-time obstacle avoidance and smart interaction
- Powerful motors and control system allow smooth climbing up to 30° slopes
- OLED display and mobile apps provide real-time status, control, and easy monitoring
- Processor STM32F103RCT6 + ESP32-S3-WROOM-1U-N4R2
- ROS Master Control PC Virtual Machine (Ubuntu 22.04 + ROS2 Humble)
- Control Methods Mobile App, Mouse & Keyboard, PC Virtual Machine, USB Wireless Handle (Optional)
- Programming Language C, Python
- Program Download Serial Port, ST-Link
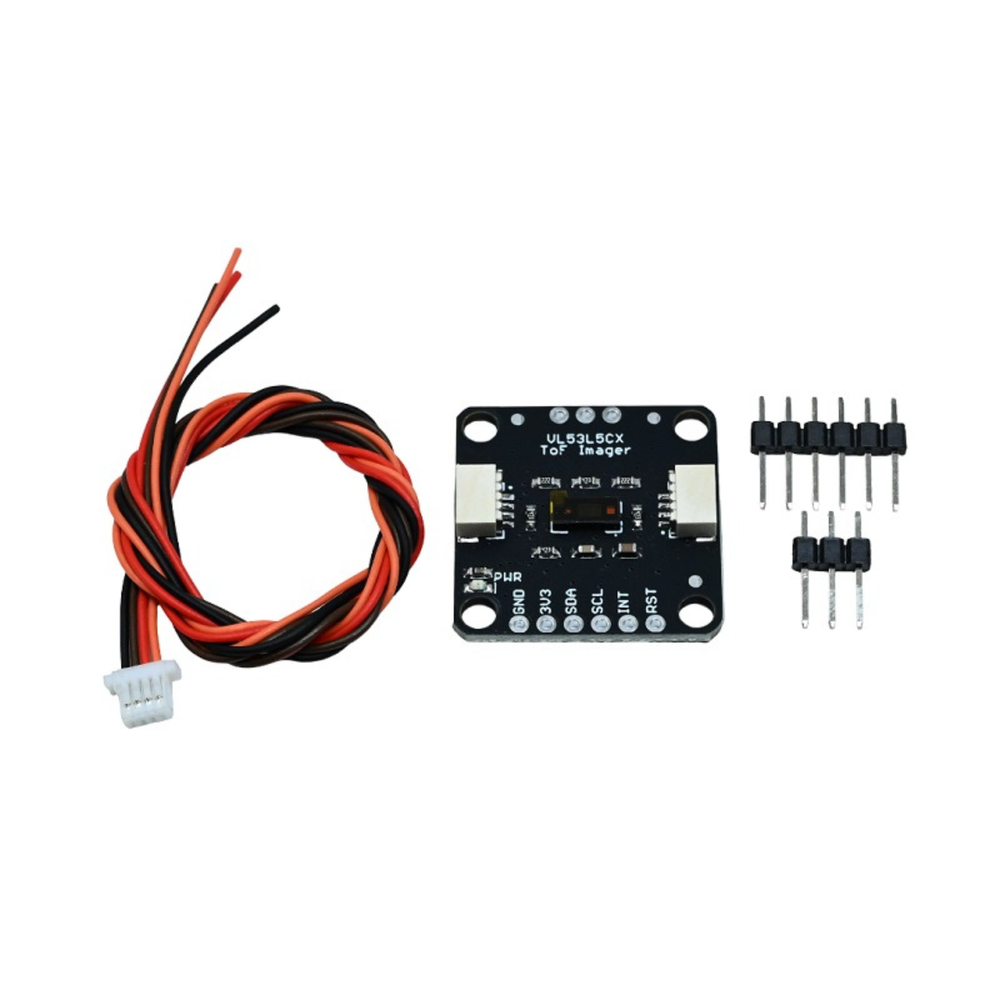
- LiDAR TOF Laser LiDAR (T-mini PLUS)
- Camera Module ROS-WiFi Camera Module (AI Vision version only)
- AI Vision Support OpenCV Image Processing, MediaPipe Machine Learning
- Load Capacity Up to 4 kg
- IMU 6-axis IMU
- Balance Control Supports PID / LQR
- Maximum Climbing Angle Up to 30°
- Motor Type 520 Encoder DC Reduction Motor × 2
- Encoder Type AB Phase Incremental Hall Encoder
- Gear Reduction Ratio 1:30
- Motor Speed 333 ±10 RPM
- Magnetic Ring Lines 11
- Input Devices LiDAR, Camera, Encoder Motors, IMU, Ultrasonic Sensor, Buttons
- Output Devices Motors, OLED Display, Buzzer
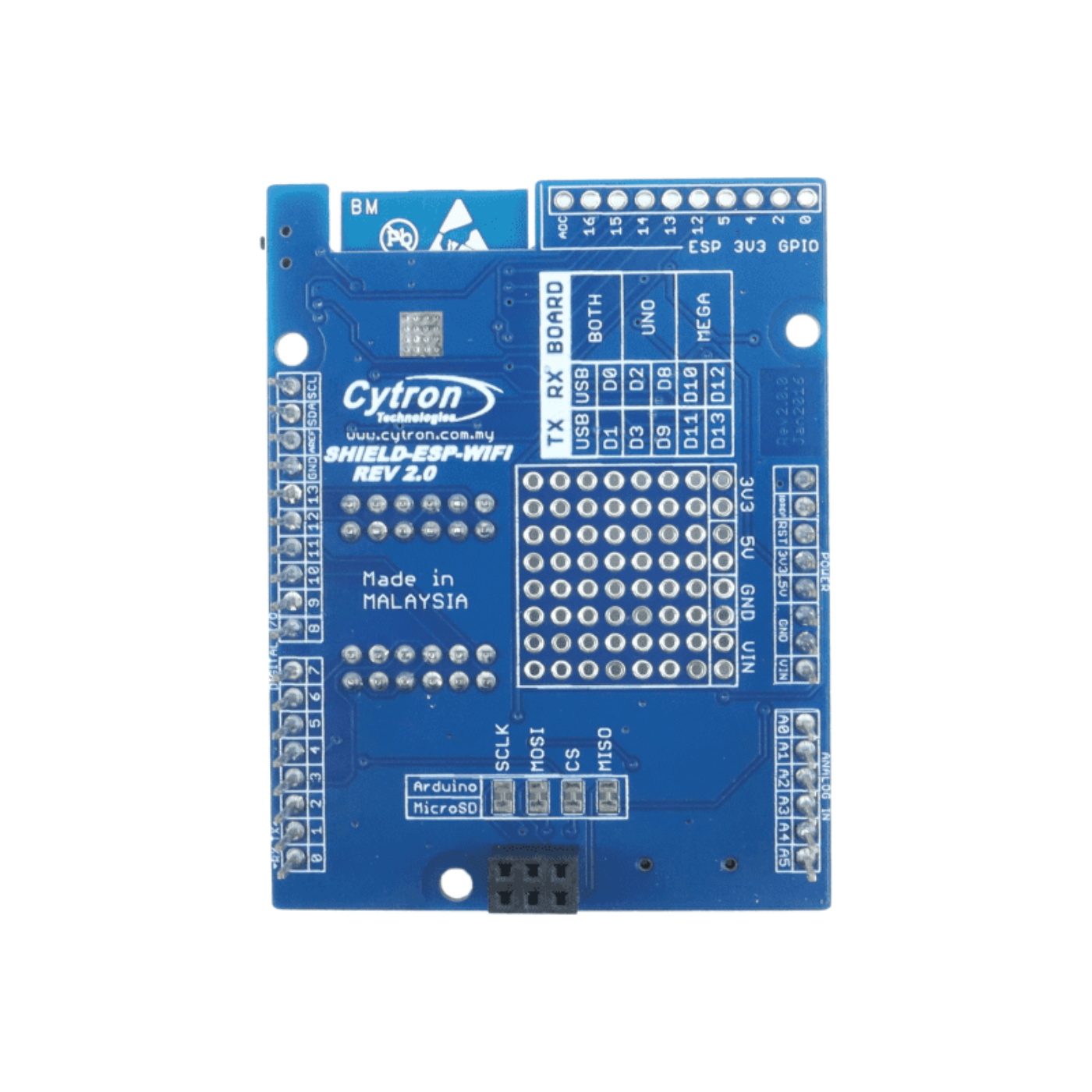
- Communication MicroROS Wireless, USART, I2C, SPI
- Expansion Interfaces USART, I2C, SPI, Sensor Expansion Ports
- Display OLED (mode & voltage display)
- Battery Capacity 2200mAh Battery Pack
- Battery Protection Over-charge, Over-current, Over-discharge, Short-circuit
- Battery Working Time Approx. 20 hours (self-balancing & static)
- Charging Method 12.6V–2A Power Adapter (DC4017 Port)
- Power Output Port DC5521 Elbow Discharge Port
- Body Material Metal + PCB + Acrylic
- Dimensions (L × W × H) 194 × 115.59 × 127.59 mm
- Weight 1060 g